|
|
 8 y/ F9 W8 K) C% Z( K4 Q8 i4 G 8 y/ F9 W8 K) C% Z( K4 Q8 i4 G
来源: 智东西, u6 D! c f m9 }8 K# ?
8 E7 J7 J* A) [9 P" V
# v6 i8 \8 Q- t- P, U
AI 和 5G 与机器人技术结合,正在不断催生新的消费电子品类。AI 解决机器理解世界,以及人机交互的问题。5G 拓展机器人的活动边界,并为机器人提供更大的算力和存储空间(云协作机器人) 。
2 T& N2 @- T! a/ W根据 IFR 的分类方法,机器人大致可分为工业机器人和服务机器人两类。 传统的工业机器人主要应用于汽车整车和零部件、电子制造、金属和机械、食品加工等方面,其主要特点是按照预定的程序,沿规定路径完成规定动作。$ |# e: T) v1 c& j! E0 a
 ▲AI/5G 如何赋能机器人/ G6 I7 @% ^4 r; Z ▲AI/5G 如何赋能机器人/ G6 I7 @% ^4 r; Z
AI 人工智能的应用,催生了服务机器人。服务机器人涵盖的范围非常广泛,包括医疗、物流、农业、商业、民用等方面。通过 AI 技术的使用,可通过数据采集、分析、计算,服务机器人能够学习人类的行为,理解人类的意图,与人类产生协作。
: B6 i. t/ Q7 V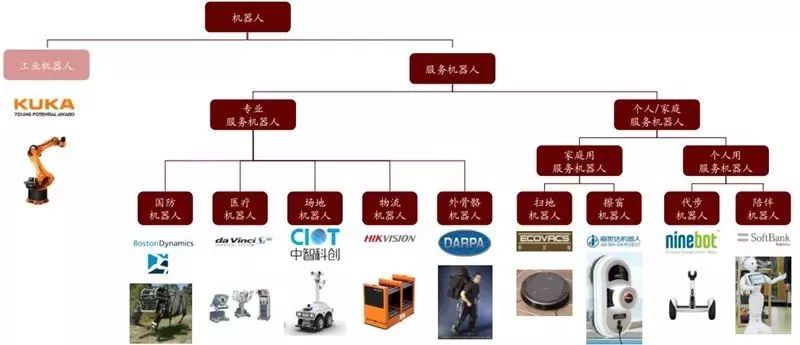 ▲服务机器人主要类别及代表性产品4 M6 T5 r; Q7 x: w+ e2 s ▲服务机器人主要类别及代表性产品4 M6 T5 r; Q7 x: w+ e2 s
根据 IFR 的测算,2017 年全球机器人市场达 232 亿美元,其中,工业机器人市场达 147亿美元,每万人的保有量达 85 台。其余为服务机器人市场,市场规模达 85 亿美元。
9 B2 ^4 l' N* w到 2030 年,预计机器人的市场规模达 1,028 亿美元,约为智能手机市场的 20%。服务机器人将达 561 亿美元,维持 16% 的年复合增长率,并快于工业机器人的年复合增速。3 Z% v2 ~% r( `
 ▲机器人市场规模拆分- O% ~3 y- g! v \9 G& v ▲机器人市场规模拆分- O% ~3 y- g! v \9 G& v

8 d% C5 t' M0 L6 @8 g% I& \( m AI/5G 如何赋能机器人?
}( Y4 i/ E: a& i1、机器视觉硬件可采集周围环境信息
1 ?* h! @, O2 \+ E$ _6 S0 T8 n' ?目前常用的视觉传感器主要有:摄像头、ToF 镜头和激光雷达技术。
$ I/ A6 v8 O8 S7 [! r机器视觉相机 。机器视觉相机的目的是将通过镜头投影到传感器的图像传送到能够储存、分析和(或者)显示的机器设备上。可以用一个简单的终端显示图像,例如利用计算机系统显示、存储以及分析图像。 Q1 u/ r. U `' f
激光雷达技术 。激光雷达是一种采用非接触激光测距技术的扫描式传感器,其工作原理与一般的雷达系统类似,通过发射激光光束来探测目标,并通过搜集反射回来的光束来形成点云和获取数据,这些数据经光电处理后可生成为精确的三维立体图像。采用这项技术,可以准确的获取高精度的物理空间环境信息,测距精度可达厘米级。
3 h# m9 ]% f" {( Y# cToF 摄像头技术 。 TOF 是飞行时间(Time of Flight)技术的缩写,即传感器发出经调制的近红外光,遇物体后反射,传感器通过计算光线发射和反射时间差或相位差,来换算被拍摄景物的距离,以产生深度信息,此外再结合传统的相机拍摄,就能将物体的三维轮廓以不同颜色代表不同距离的地形图方式呈现出来。
& t9 ~; J# s' F* j" @2、 AI 视觉技术算法帮助机器人识别周围环境- A, M) v- q$ c* V3 [
视觉技术包括:人脸技术、物体检测、视觉问答、图像描述、视觉嵌入式技术等。
0 c6 w; r; F) v g& o# a人脸技术:人脸检测能快速检测人脸并返回人脸框位置,准确识别多种人脸属性;人脸比对通过提取人脸的特征,计算两张人脸的相似度并给出相似度百分比;人脸查找是在一个指定人脸库中查找相似的人脸;给定一张照片,与指定人脸库中的 N 个人脸进行比对,找出最相似的一张脸或多张人脸。根据待识别人脸与现有人脸库中的人脸匹配程度,返回用户信息和匹配度,即 1:N 人脸检索。0 ], ` z: ~6 K8 N( T3 _
物体检测:基于深度学习及大规模图像训练的物体检测技术,可准确识别图片中的物体类别、位置、置信度等综合信息。
R u5 a) v: m M/ Q) ]1 f视觉问答:视觉问答(VQA)系统可将图片和问题作为输入,产生一条人类语言作为输出。
, }! u) @( R& q$ T图像描述:需要能够抓住图像的语义信息,并生成人类可读的句子。
9 v3 ?2 v. y) G9 S视觉嵌入式技术:包括人体检测跟踪、场景识别等。
" p, u9 ?. L1 {* }3、 SLAM 技术赋予机器人更好的规划移动的能力
# w9 s& ^7 U! a, M+ }3 gSLAM,全称叫做 Simultaneous Localization and Mapping,中文叫做同时定位与建图。在SLAM 理论中,第一个问题称为定位(Localization),第二个称为建图(Mapping),第三个则是随后的路径规划。通过机器视觉的映射,机器人可以通过复杂的算法同时定位并绘制出位置环境的地图,通过 SLAM 技术可以有效解决规划不合理,路径规划无法覆盖所有地区,导致清洁效果一般的问题。9 E- h" B1 W( S+ J, Z4 W8 B0 L
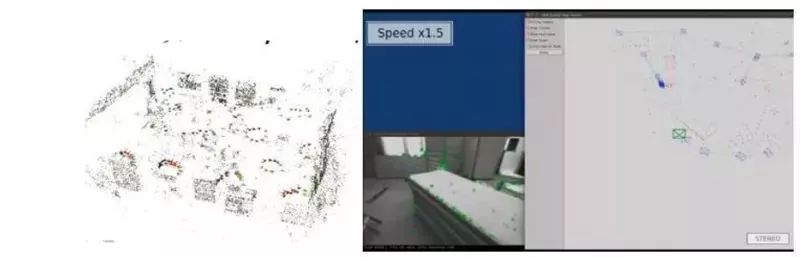 ▲SLAM 技术7 I8 s3 B) b, s+ K ▲SLAM 技术7 I8 s3 B) b, s+ K
当完全不含 SLAM 的时候,由于没有地图没有路径规划,扫地机器人每次碰到障碍物会沿着随机方向折返,无法覆盖到每一个区域。当有 SLAM 的时候,可覆盖至任意区域。此外,扫地机器人还配备摄像头,用来识别鞋、袜子、动物粪便等物品,达到智能规避。+ L! e+ x( W: y5 | n& u# z3 D! S
4、基于 ToF 机器视觉的超宽带定位技术
+ |! e d: ~; y8 r; E1 H% {* V* Y机器人中,基于 ToF 技术,主要可用来进行高精度测距与定位,目前常用的就是超宽带定位技术。
. e( ^+ [1 V3 [4 l- W3 IUWB(超宽带)是一种无线通信技术,可用于高精度测距与定位。UWB 传感器精简设备分为标签和基站两种。其基本工作方式是采用 TOF(Time of flight)的方式来进行无线测距,根据测距值快速准确计算出位置。
/ e' [) L6 m3 m' `: H, Q% Y5、 AI 自然语言处理是人机交互的重要技术
# T# R Y0 k$ B7 s' m3 A人类获取信息的手段中 90%依靠视觉,但表达自己的方式 90%依靠语言。语言是人机交互中最自然的方式。但是自然语言处理 NLP 的难度很大,在语法、语义、文化中均存在差异,还有方言等非标准的语言产生。随着 NLP 的成熟,人类与机器的语音交互越来越便捷,也将推动机器人向更“智能化”发展。
- v# a- h6 h$ S6 O# u( f7 y' a2 G7 M" `机器人的阵列式麦克风和扬声器技术已经比较成熟,随着近年智能音箱+语音助手的快速发展,麦克风阵列和微型扬声器被广泛使用。 在钢铁侠陪伴机器人中,与用户的语音交互都依靠麦克风阵列和扬声器,此类陪伴机器人就如同会动的“智能音箱”,拓展了边界形态。2 k: f& j8 V: d/ }& U( D
目前对话机器人可分为通用对话机器人和专业领域对话机器人。自然语言处理的技术发展,将提升机器人与人类的交互体验,让机器人显得更为“智能”。
1 F# K9 }" v) i3 Y6、 AI 深度学习算法帮助机器人向产生自我意识中进化
( M+ P* E0 a! u9 ]. z1 `硬件:AI 芯片技术的发展,使机器人拥有更高算力。 由于摩尔定律的发展,单位面积芯片容纳的晶体管个数不断增长,推动芯片小型化和 AI算力的提升。此外,异构芯片如 RISC-V 架构芯片的产生,也为 AI 芯片的算力提升提供了硬件支持。1 I, l8 g* t+ r4 }3 ]. T
算法:AI 深度学习算法是机器人的未来 。AI 深度学习算法给予机器人通过输入变量学习的能力。未来的机器人能否拥有自主意识,需要 AI 技术的不断发展。 深度学习算法给机器人获得自我意识提出了一种可能性。通过对神经网络模型的训练,一些算法已经可以在单点的领域超越人类,Alpha Go 的成功,让我们看到人类在 AI 技术中,已可实现单类别的自我学习能力,并在一些领域,如“围棋、德州扑克、知识竞赛”等单个领域已经可以媲美甚至打败人类。/ D. P( h, z7 h3 l j$ U
AI 深度学习算法,使机器人拥有了智能决策的能力,摆脱了之前单一输入对应单一输出的编程逻辑,也让机器人更加“智能”。 但是,机器人在“多模态”领域,仍无法与人类媲美。特别是如嗅觉、味觉、触觉、心理学等无法量化的信号,仍未能找到合理的量化方式。
0 r- D( Z6 `5 v: W1 o7、 AI+5G 拓展机器人的活动边界,提供更大算力和更多存储空间,形成知识共享/ K0 F8 }. q6 m% o& H& V( ~9 h
4G 时代,移动机器人的四大痛点 :
+ p4 l* e* J X' }+ v3 j- L% A1)工作范围受限:只能在固定的范围内执行任务,构建的地图不便于共享,难以在大尺度环境下工作。
0 ~2 X% q& y2 B* J2) 业务覆盖受限:运算有限,识别性能仍需提升;能力有限,仅能发现问题,难以快速批量部署。
, G. ?8 @/ k9 V9 I2 h: L3) 提供服务受限:复杂业务能力差,交互能力有待提高,特种业务部署效率低。
- d5 C( ]6 a2 ?9 n4) 运维成本高:部署效率低,每个场景都需构建地图,规划路径;,配备巡检任务等。
5 c; a0 H/ u. V: x9 {9 [这四大痛点,制约了移动机器人在 4G 时代的渗透。总体来说,就是机器人仍需要更多的存储空间和更强的运算能力。5G 的低延时、高速率、广连接将能够解决目前的这些痛点。
0 e% x8 d2 x8 n. q; P5G 对于移动机器人的赋能:( T9 j( D& l% ^. w _ D% [. V& u
1)拓展机器人的工作范围 。 5G 对于机器人的最大赋能就是拓展了机器人的物理边界,5G 对于 TSN(时间敏感网络)的支持,使机器人的活动边界从家庭走向社会的方方面面。我们大可以想象未来人类与机器人共同生活的场景。在物流、零售、巡检、安保、消防、指挥交通、医疗等方面,5G 和 AI 都能够赋能机器人,帮助人类实现智慧城市。
. |) H/ G) o) j" g0 [0 t9 O9 Q$ I+ p; R2) 为机器人提供更大算力和更多存储空间,形成知识共享。 5G 对云机器人的推动,为机器人提供更大算力和更多存储空间:弹性分配计算资源:满足复杂环境中的同步定位和制图。访问大量数据库:识别和抓取物体;基于外包地图的长期定位。形成知识共享 :多机器人间形成知识共享。
% d& G/ O7 F4 f7 u& I; y/ v 8 w5 h! X8 c9 I 8 w5 h! X8 c9 I
主要服务机器人简介9 ~- c5 R9 P( Z) {- Y& }
1、 扫地机器人:AI 技术解决目前痛点,助力行业蓬勃发展% v% {" |. i; k7 W+ a
预计到 2021 年,全球市场规模将达到接近 500 亿人民币,中国市场规模将达 151 亿元人民币。
* H. Y G" V( k. e; {& P ▲扫地机器人全球及中国市场规模测算 ▲扫地机器人全球及中国市场规模测算
$ ]' A' h* n7 V. w. m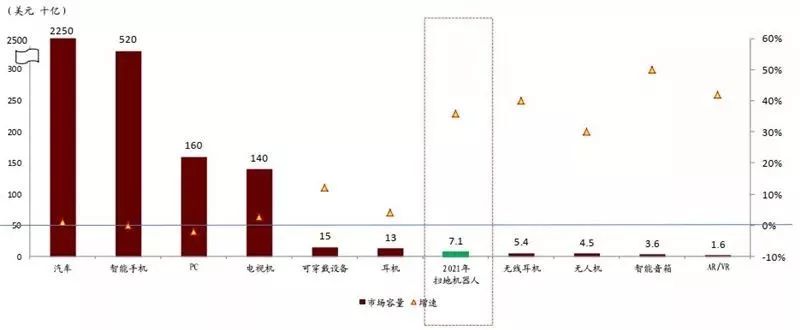 ▲2021 年扫地机器人及 2018 年其他品类全球市场规模测算% O) Z8 ^3 O" l5 v ▲2021 年扫地机器人及 2018 年其他品类全球市场规模测算% O) Z8 ^3 O" l5 v
2、物流机器人:AI 和 5G 正催生 AGV 和无人配送机器人的发展; z2 j/ U6 r# p! `
根据 BIS Research 数据统计,2016 年全球 AGV 销量同比增长 38.8%至 2.6 万台,主要由于电商仓储 AGV 的使用和推广;中国 AGV 销量同比大幅增长 88.5%至 9,950 台;RIC 预计2017-2021 年中国 AGV 销量有望保持年均 43.0%的速度增长,2021 年将达到 6.1 万台。汽车行业、家电制造等生产物流端仍是中国 AGV 主要需求市场,2016 年占比约 55%,需求稳定,但对产品智能自动化等要求越来越高;电商等仓储物流端 AGV 需求增速较快,2016年需求占比约 29%,至 2021 年有望提升至 32%。
- o: B/ }4 I* Q: x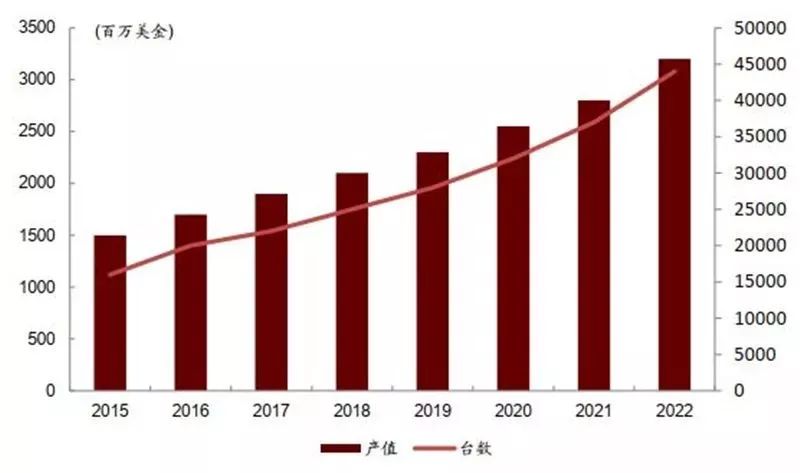 ▲AGV 全球市场预测 ▲AGV 全球市场预测
3 Q/ o1 J$ c! [) j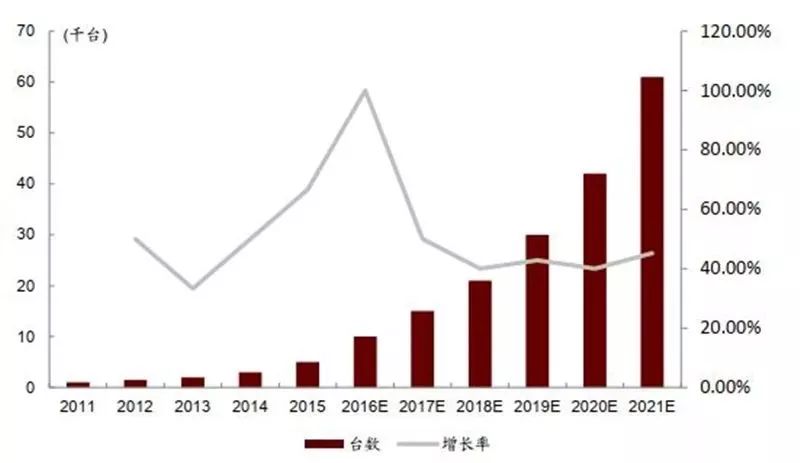 ▲AGV 中国市场预测* }8 m6 n& ~5 j3 f ▲AGV 中国市场预测* }8 m6 n& ~5 j3 f
自动导引运输车(AGV):无人仓储的解决方案 。自动导引运输车(Automated Guided Vehicle,AGV)的行进过程中,通过机器视觉来判断行进路线、摆放位置、周围环境等重要信息,是实现无人仓储的主流方案。 AGV特点:AGV通常装备有电磁引导式、激光引导式或机器视觉引导式等自动导引装置,它能够沿规定的导引路径行驶,是具有安全保护以及各种移载功能的运输车。AGV 以轮式移动为特征,较其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。与物料输送中常用的其他设备相比,AGV 的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化仓储。
: t: l, q b: U3 N# F- `7 {仓储管理系统 。 在仓储管理中,AI 算法应用到仓储管理系统相对较为成熟。以基于 RFID 技术的仓储管理系统为例,通过将 RFID 识别技术和计算机的数据库管理查询相结合,可以节省人力物力,相比于传统(人工)仓库管理系统,具有以下优势:1)全自动化识别出入库物品,无需人员干涉,并且可以同时识别多个物品;2)快速、准确、自动进行数据采集,实时、精确掌握库存情况;3)缩减盘点周期,提高数据实时性,实现对库存物品的可视化管理;4)降低人力以及管理成本。
3 p: e! B4 s9 ~: H- I3、平衡车机器人:在休闲运动市场的崛起
7 |$ R' R3 y/ X探索期:定位变革性的交通工具 。 2001 年,狄恩·卡门(Dean Kamen)推出双轮平衡车(中间带杆子),并创建了 Segway公司。2010 年,富豪吉米·何塞尔买下 Segway。- W* D. i* h5 g6 `; w) E( P- q
刚开始 Segway 期望改变世界的出行方式,主要销售对象是商用客户。由于产品价格高,适用场景少,Segway 的收入规模一直很小。2015 年 Segway 被 Ninebot 收购,根据新闻报道,其年收入 4000 万美金左右,年销量 1 万台左右。平衡车又被称为体感车、思维车、摄位车等。市场上主要的品类包括双轮平衡车(带操纵杆)、双轮平衡车(无操纵杆)、独轮平衡车、平衡轮(类似电动旱冰鞋)。2010 年,美国华人 Shane Chen(陈星)发明独轮平衡车 SoloWheel。2012 年,陈星又发明了两轮平衡车 Hovertrax(无操纵杆)。
9 h4 U, N5 b, e/ } l; I7 A发展期:中国企业从山寨开始,之后并购美国企业 。 2009 年开始,中国市场迅速山寨,并返销美国市场(公司境内经营实体鼎力联合成立于2012 年)。2014 年 Segway 在美国起诉乐行、Ninebot (纳恩博)在内的 5 家平衡车公司侵犯 Segway 专利。2015 年 4 月,Ninebot(纳恩博)全资收购 Segway,获得 Segway 三大产品系列近十款产品,400 多项专利,乐行天下在 2017 年收购 Solowheel,获得相关专利。( }3 u& M3 K- h! E0 H: E7 p1 U% e
成长期:休闲运动市场的崛起 。虽然平衡车的初衷是改变世界出行方式,但真正让平衡车崛起的是休闲运动市场。Ninebot 收购 Segway,并获得小米的支持后,推出了适合消费品市场的低价产品(2015年 10 月推出 9 号平衡车,定价 1999 元)。平衡车被消费者作为儿童、年轻人休闲运动的产品,销量开始大幅增长。Ninebot 开始重视休闲运动市场,引入了电动滑板、卡丁车套件、儿童自行车产品。2018 年电动滑板车、平衡车营收占比 66%、29%,分别同比变动+42ppt、-45ppt。
" d! W2 F+ X# ~( a- d7 ~平衡车路权:在美国部分州允许平衡车在人行道上使用。在中国,平衡车被限制在封闭小区道路和室内场馆等地方使用。平衡车的控制需要较高的技巧,会有一些不同于普通交通工具的风险,例如原 Segway 的控制人吉米·何塞在一次使用平衡车遛狗时不幸坠崖身亡。
2 ^7 w: R0 E, z1 s2 u4、 陪伴机器人:AI 自然语言处理解决人机交互,5G 催生云服务机器人的发展
8 @- l( v4 i$ N8 R5 y9 S陪伴机器人存在两种发展路径,一类如索尼、夏普等公司应用机器人技术制作带关节仿生机器人,主要以陪伴老人、儿童教育、娱乐休闲为主。另一类如三星、亚马逊等公司推出显示屏机器人,主要希望做机器人 OS 平台,对外输出软件及 AI 服务 。
3 e$ x' ^6 A$ d( o* R( J在陪伴机器人方面,我们看到两种机器人,一种是小型的机器人。如 Sony 的 Aibo 机器狗,Sharp 的机器猫,高桥隆治的 Robi 等。这些机器人主要作用包括与用户的交互、陪伴、教育、与他人的通讯等,目前大部分已商业化。
1 Q3 X. K. r7 U/ q, a: S! i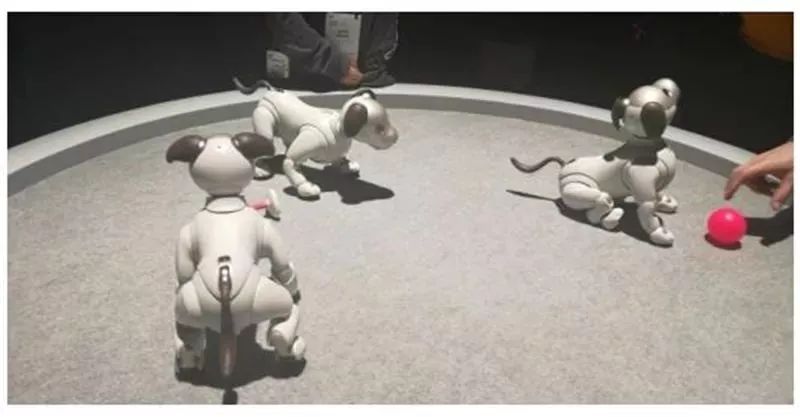 ▲Sony 的 Aibo 机器狗 ▲Sony 的 Aibo 机器狗
2 ^' H- l$ D9 Y3 \- A另一种是大型的直立机器人,最为有名的就是本田的 Asimo,波士顿动力等优秀企业的机器人。这类大型机器人一般配备双足,可实现上下楼梯、抓取物品,与人类交互等功能。9 G+ F: E5 B, ^# A
 ▲本田Asimo( Q, T* ^' S' \- q; e1 d0 \9 P" j ▲本田Asimo( Q, T* ^' S' \- q; e1 d0 \9 P" j
5、 医疗机器人:AI 和 5G 在医疗诊断、外科手术和肢体康复中需求强烈
+ l% y) V4 k* i: e" O/ R胶囊机器人。胶囊机器人+自动诊断系统:可能过采集到的图像自动判断病人可能出现的问题,为医生诊断提供参考意见。搭配云端的自动诊断系统,可实现异地诊断,多地诊断。3 q6 P( S, |: G3 a6 a* l: ~ \& |; m
 ▲胶囊机器人 ▲胶囊机器人
3 O) a7 [7 {% L3 ]外科手术机器人 。 目前广泛采用的手术机器人包括持物臂式机器人、导航机器人和主从式机器人。
" t3 \6 S$ U' G" S ▲手术持物臂式机器人 ▲手术持物臂式机器人
( C( O/ R9 f0 g# o4 G导航机器人:为外科医生规划手术路径、在手术中进行提示 。手术导航目前分为光学导航和电磁导航两种。光学导航精度高、不受其他设备的电磁干扰,但容易被遮挡光路。电磁导航操作灵活、体位要求低但会受到电磁干扰。
: k8 W- I& A$ R. r光学导航主要应用在神经外科、脊柱外科、关节外科、颌面外科中。电磁导航主要应用在颅内活检、置管、支气管镜检查方面。- C4 g4 b0 b3 r' ^+ w4 F" D
主从机器人:为外科医生远程手术、离台手术提供技术支持 。
& V6 K# L; T" {$ L2 U2 s达芬奇机器人手术系统,就是一种主从式机器人系统,可帮助医生在未来实现离台手术,甚至远程手术,让医生可以坐着手术,减少因为疲劳、失神造成的医疗事故。
$ o0 |$ @; D- z U8 [肢体运动康复机器人 。目前的康复机器人主要是上肢的康复机器人,以及下肢的外骨骼机器人。" a+ w$ L- u1 Z$ X X. ~: g
6、商业零售机器人:室内无人配送机器人的规模化及普及- x# {( `; h4 i$ \. h4 _
在商业零售领域,近年,已有许多机器人进入,包括超市导购机器人、酒店送水送餐机器人等,这些室内配送机器人帮助商业零售提高运作效率,减少人力成本,并为服务增添趣味性,受到用户的欢迎。随着人力成本的继续上升,商业机器人的前景广阔,值得关注。4 z3 y3 p5 h+ }$ c9 w5 K
 ▲导购机器人与人类交互& c4 f `5 b( \ ▲导购机器人与人类交互& c4 f `5 b( \
7、 仿生机器人:成为人类的一部分- ~8 b( J% L$ s
意识控制的机器人:在一些前沿机器人研究中,已出现意识控制的机器人手臂。用户需要将机械手臂接入人类脑部系统,通过一定的训练,可控制机械手臂抓取饮料。; y8 Y( @/ d* |( [' s! A
仿生学机器人:人类已经开发出一些仿人类器官的机器人,利用前面提到的意识控制可让残疾人恢复正常的功能,这将是个很大的市场。8 U h* O' v8 _' L: Y
 ▲意识控制的机器人 ▲意识控制的机器人
% W: D6 P) H: H; b% r7 H% |4 ^智东西认为,5G+AI技术影响的行业很多,但没有哪个像机器人行业的未来那样令人憧憬。AI 将帮助传统机器人从不能与人类协作,走向可以服务人类,并逐渐向认知、推理、决策的智能化进阶;而 5G 技术的成熟,将进一步拓展机器人的应用边界。通过低延时、高速率、广连接的特点,5G 可以拓展服务机器人的应用边界,并为机器人提供更大算力和更多存储空间,形成知识共享。未来,随着技术积累到质变点,扫地机器人、物流机器人这类将成为“小儿科”,如科幻电影般的机器人很有可能在不远的将来出现,并全面渗入人类社会,帮助人类共同生活。 % G1 ?3 Q- c" p1 ?- A
 # ~+ N" N1 W( @% d! b- V; D # ~+ N" N1 W( @% d! b- V; D
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。3 a8 w& [* n* q# Q1 Y. J/ D: ?: J
/ w; p$ B0 F% ~0 H+ E
, H/ I- b3 O b: v/ U未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
* @3 Z# Y$ k- p" l# N
9 d5 t+ m# Z" w, c1 T
* N1 ]' o9 n9 X# A8 r8 q; H5 A& X' k4 H 如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”
! F: V: O' @# Y! q
" T) K8 x9 \( p( \4 x
- n. R2 L+ E4 i3 q8 q1 ^来源:http://mp.weixin.qq.com/s?src=11×tamp=1570365004&ver=1896&signature=SeFahR20bUrOXlK6WXamxD-Hv4vLj6srhgU29eKGWkW9AUYBPG3cuP7c6RDoI2yEByYjka-dtxS3oUBW8xCB9X8epvtBwA-MApau7NznJf*BAg3wl9kRUaarSHbaVlev&new=1
: ]- N6 ]" h. ~7 ?) T" h/ C. Y$ m, o, B免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! |
本帖子中包含更多资源
您需要 登录 才可以下载或查看,没有账号?立即注册

×
|
 |手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图
|手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图

 发表于 2019-10-6 20:58:59
发表于 2019-10-6 20:58:59
